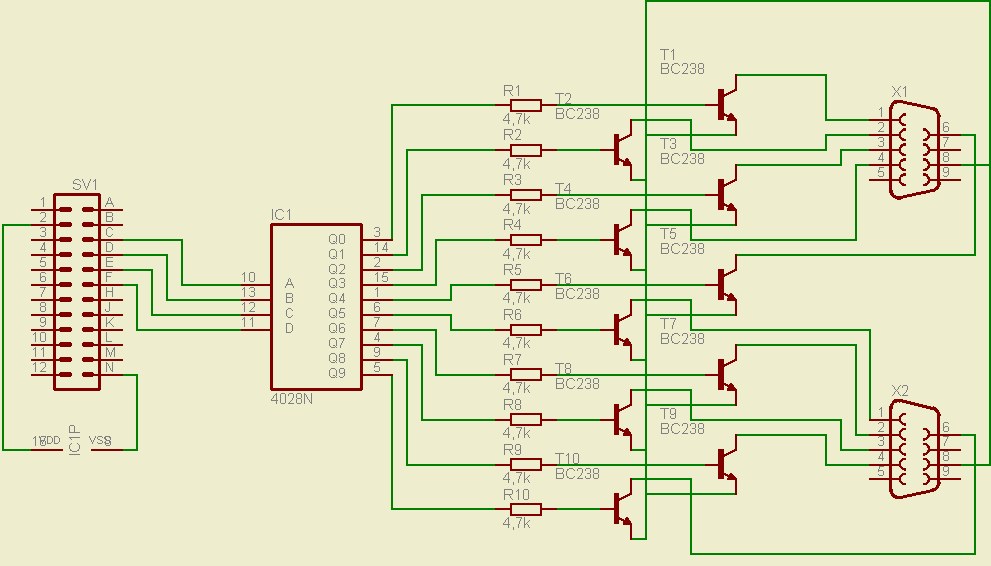
L'atelier Robotarm SVI le schéma



les 2 cables sont juste une bretelle pin1 a pin1 , pin2 a pin2 etc jusqu'a pin9 a pin9
les 2 miens ont des faux contacts
j'avais oublié les piles dans le robot et bien sur une a coulé
nettoyage au vinaigre et rinçage a l'eau et c'est reparti car le connecteur na pas été touché
ENLEVEZ VOS PILES AVANT DE RANGER VOTRE BRAS ROBOT
les moteurs ont eu du mal a repartir , j'ai aidé les mouvements ça m'a évité un redémontage
les 2 miens ont des faux contacts
j'avais oublié les piles dans le robot et bien sur une a coulé
nettoyage au vinaigre et rinçage a l'eau et c'est reparti car le connecteur na pas été touché
ENLEVEZ VOS PILES AVANT DE RANGER VOTRE BRAS ROBOT
les moteurs ont eu du mal a repartir , j'ai aidé les mouvements ça m'a évité un redémontage

je rapelle les commandes a envoyer en basic
l'adressage est 0 et 1
les commandes out 0.0 out 1.0 arrêtent tous mouvement
out 0.1 out 0.2 bougent l'axe 2 Bras Inf
out 0.4 out 0.8 bougent l'axe 1 Base
out 0.16 out 0.32 bougent l'axe 5 Pince
out 1.1 out 1.2 bougent l'axe 3 Bras Sup
out 1.4 out 1.8 bougent l'axe 4 Rotation pince
il faut lancer une commande du genre
out0,1:fort=0to300:next:out0,0
si on ne stoppe pas par le out0,0 on va aux butées des mécanismes avec d'affreux craquements
pour être sur de l'utilisation du -3V j'ai coupé les pins 9 sur la cartouche du robot et la moitié des mouvements ne sont plus actifs
l'adressage est 0 et 1
les commandes out 0.0 out 1.0 arrêtent tous mouvement
out 0.1 out 0.2 bougent l'axe 2 Bras Inf
out 0.4 out 0.8 bougent l'axe 1 Base
out 0.16 out 0.32 bougent l'axe 5 Pince
out 1.1 out 1.2 bougent l'axe 3 Bras Sup
out 1.4 out 1.8 bougent l'axe 4 Rotation pince
il faut lancer une commande du genre
out0,1:fort=0to300:next:out0,0
si on ne stoppe pas par le out0,0 on va aux butées des mécanismes avec d'affreux craquements
pour être sur de l'utilisation du -3V j'ai coupé les pins 9 sur la cartouche du robot et la moitié des mouvements ne sont plus actifs
Pour ma part, je viens de placer des piles dans le mien et de faire des essais.
Les connexions décrites sur ma schématique semble correctes. Il suffit de relier la broche 8 des connecteurs du robot aux broches An+ et An- pour actionner le moteur de l'axe n dans chaque sens.
J'ai essayé de simulé le montage avec PartSim : +12 V, +5 V, résistances, transistors, etc... Mais sans résultat probant. Première fois que j'utilise PartSim, je ne l'utilise peut-être pas correctement.
Les connexions décrites sur ma schématique semble correctes. Il suffit de relier la broche 8 des connecteurs du robot aux broches An+ et An- pour actionner le moteur de l'axe n dans chaque sens.
J'ai essayé de simulé le montage avec PartSim : +12 V, +5 V, résistances, transistors, etc... Mais sans résultat probant. Première fois que j'utilise PartSim, je ne l'utilise peut-être pas correctement.
Merci Jipe de ton aide.
Inutile de dire que ton travail d'étude de ton interface m'a permis d'avancer.
Je ne pensais pas que ma question amènerait à couper des pistes sur ta cartouche.
Tes essais faits sous Basic sont conformes à la schématique.
Par contre, je ne comprends pas le -3V broche 9 à la masse. Edité par Patrick Le 23/07/2017 à 17h47
Inutile de dire que ton travail d'étude de ton interface m'a permis d'avancer.
Je ne pensais pas que ma question amènerait à couper des pistes sur ta cartouche.
Tes essais faits sous Basic sont conformes à la schématique.
Par contre, je ne comprends pas le -3V broche 9 à la masse. Edité par Patrick Le 23/07/2017 à 17h47
moi aussi j'ai commencé une simulation avec ISIS
il ne faut pas oublier qu'il y a des transistors PNP et des NPN
la broche 8 des MSX n'est pas la masse mais une sortie I/O du PSG
la vraie masse est bien la broche 9
pour les broches 5 9 et 8 elles correspondent aux alims pas les piles qui sont omise sur le schéma
il ne faut pas oublier qu'il y a des transistors PNP et des NPN
la broche 8 des MSX n'est pas la masse mais une sortie I/O du PSG
la vraie masse est bien la broche 9
pour les broches 5 9 et 8 elles correspondent aux alims pas les piles qui sont omise sur le schéma
Je suis d'accord avec toi, mais le robot peut se piloter soit via des joysticks compatibles Atari CX40, soit via l'interface SVI 2000C.
Voici le brochage du joystick Atari (source) :
Pin Description
1 Up
2 Down
3 Left
4 Right
5 Not connected
6 Button
7 Not connected
8 Ground
9 Not connected
Dans ce cas, le fonctionnement est conforme à mes essais : mise à la masse broche 8 des broches de commandes.
Voici le brochage du joystick Atari (source) :
Pin Description
1 Up
2 Down
3 Left
4 Right
5 Not connected
6 Button
7 Not connected
8 Ground
9 Not connected
Dans ce cas, le fonctionnement est conforme à mes essais : mise à la masse broche 8 des broches de commandes.
En fait, cela n'a aucune importance puisque le robot est branché sur l'interface et pas sur les ports joystick du MSX.
C'est pour cela que je ne comprends pas l'utilisation de la broche 9 sur l'interface. Edité par Patrick Le 23/07/2017 à 17h55
C'est pour cela que je ne comprends pas l'utilisation de la broche 9 sur l'interface. Edité par Patrick Le 23/07/2017 à 17h55
Je ne dispose pas de ce logiciel et PartSIm ne me donne rien de probant.
Tu veux dire que si tu n'envois pas de commande, le moteur tourne en permanence ?
Je t'invite à consulter le fil de discussion sur le forum system-cfg, une explication du fonctionnement du montage a été donnée.
Tu veux dire que si tu n'envois pas de commande, le moteur tourne en permanence ?
Je t'invite à consulter le fil de discussion sur le forum system-cfg, une explication du fonctionnement du montage a été donnée.
Répondre
Vous n'êtes pas autorisé à écrire dans cette catégorie