L'atelier Robotarm SVI le schéma



En fait si je raconte pas trop de conneries, il faut donc simplement:
Hardware:
1) connecteur Centronic
2) Un CI qui reproduit le comportement décrit plus haut.
3) Quelques résistances
4) Deux connecteurs DB9
5) Les connaissances de Jipe
Le plus gros challenge étant de faire tenir le tout dedans le boitier métal du Centronic
Software:
1) Logiciel en Basic qui doit pas être trop compliqué (enfin je parle pas pour moi biensur )
)
Le tout étant de trouver une combinaison de touches qui soit intuitive.
Le top serait une sorte d'enregistrement des (Appuies sur touches en temps réèl ou pas) de sorte à pouvoir sauvegarder et reproduire un mouvement précédemment, crée.
Cela permettrait au Robot de reproduire un "Chorégraphie" pré-enregistrée Edité par
igal
Le 24/10/2011 à 22h21
Edité par
igal
Le 24/10/2011 à 22h21
Hardware:
1) connecteur Centronic
2) Un CI qui reproduit le comportement décrit plus haut.
3) Quelques résistances
4) Deux connecteurs DB9
5) Les connaissances de Jipe
Le plus gros challenge étant de faire tenir le tout dedans le boitier métal du Centronic
Software:
1) Logiciel en Basic qui doit pas être trop compliqué (enfin je parle pas pour moi biensur
)Le tout étant de trouver une combinaison de touches qui soit intuitive.
Le top serait une sorte d'enregistrement des (Appuies sur touches en temps réèl ou pas) de sorte à pouvoir sauvegarder et reproduire un mouvement précédemment, crée.
Cela permettrait au Robot de reproduire un "Chorégraphie" pré-enregistrée
Edité par
igal
Le 24/10/2011 à 22h21



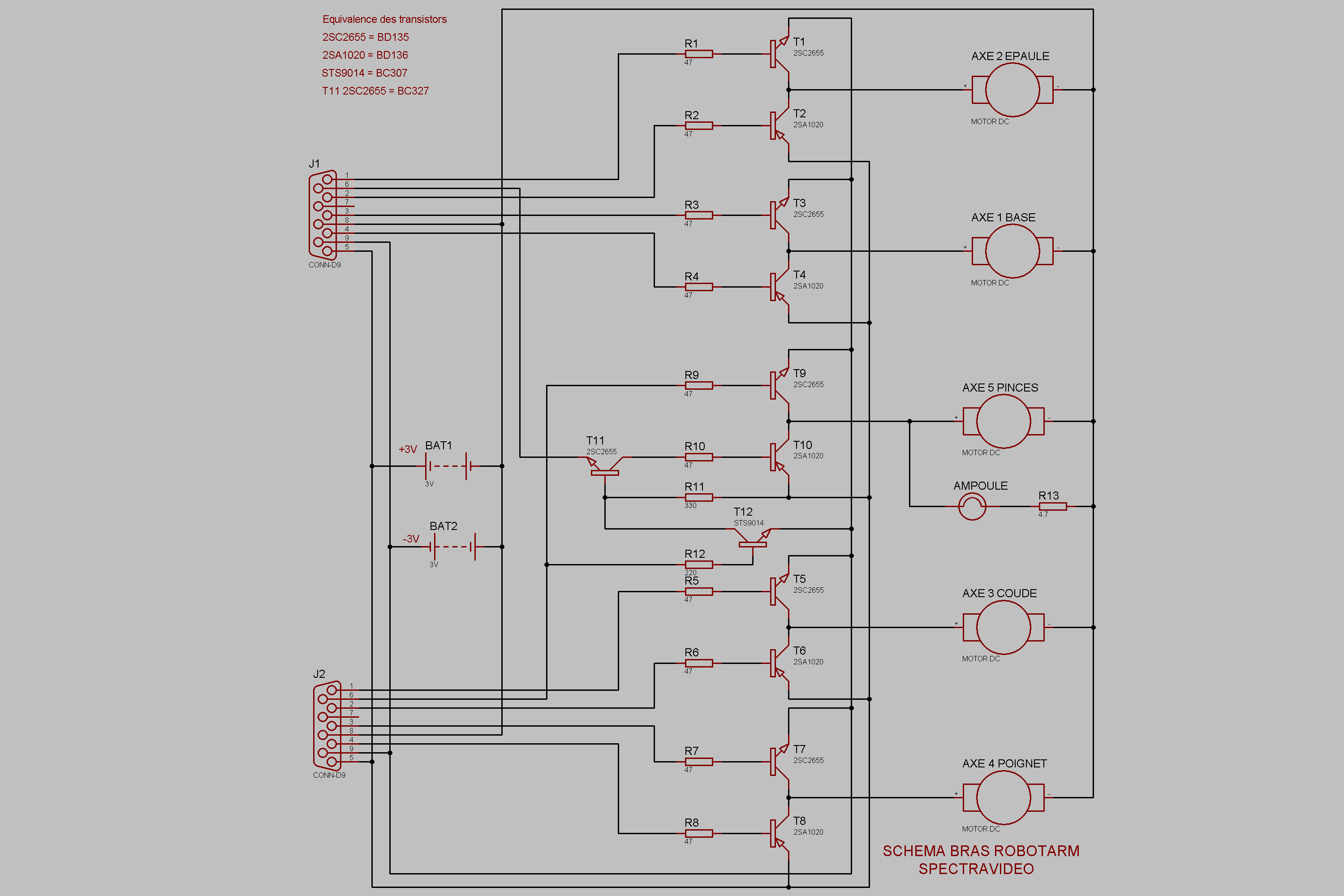
1er point a aborder : il ne faut jamais piloter les 2 directions d'un mouvement en même temps sous peine de destruction des transistors situés dans la base du robot
2éme point : ne jamais piloter directement avec la centronics des circuits de " puissance" il faut un étage intermédiaire
3éme point : la partie rom du robot n'est pas obligatoire il faut juste recopier la partie pilotage par les OUT
2éme point : ne jamais piloter directement avec la centronics des circuits de " puissance" il faut un étage intermédiaire
3éme point : la partie rom du robot n'est pas obligatoire il faut juste recopier la partie pilotage par les OUT

Salut Jipe:
1) L'idée d'un CI qui "dérive ou empèche" les signaux lorsqu'ils sont contradictoire tient la route?
2) L'étage intermédiaire c'est pour empêcher de "cramer" le S3527" par exemple?
Un CI qui reproduit le comportement "vulgairement ébauché" suffit pour jouer le rôle d'étage intermédiaire?
Ou alors il faut une sorte d'amplificateur de signaux?
3) Que faut il comprendre par piloter avec les OUT?
Tu veux dire câbler simplement le signal voulu sur le Pin du [DB9 Robotarm] désiré?
Merci pour tes lumières
1) L'idée d'un CI qui "dérive ou empèche" les signaux lorsqu'ils sont contradictoire tient la route?
2) L'étage intermédiaire c'est pour empêcher de "cramer" le S3527" par exemple?
Un CI qui reproduit le comportement "vulgairement ébauché" suffit pour jouer le rôle d'étage intermédiaire?
Ou alors il faut une sorte d'amplificateur de signaux?
3) Que faut il comprendre par piloter avec les OUT?
Tu veux dire câbler simplement le signal voulu sur le Pin du [DB9 Robotarm] désiré?
Merci pour tes lumières
Citation :
1) L'idée d'un CI qui "dérive ou empèche" les signaux lorsqu'ils sont contradictoire tient la route?
on peux verrouiller par des portes logiques mais ça va compliquer les choses
Citation :
2) L'étage intermédiaire c'est pour empêcher de "cramer" le S3527" par exemple?
oui par exemple
 la carte de pilotage d'origine ne contient que 6 puces 10 transistors et 10 résistances
la carte de pilotage d'origine ne contient que 6 puces 10 transistors et 10 résistanceselle est de grande dimension car elle utilise un boitier standard de chez SVI mais elle peut être réduite a un cartouche de taille normale
Citation :
3) Que faut il comprendre par piloter avec les OUT?
il faut juste faire un circuit minimal et utiliser les commandes OUT qui sont déja dans la carte d'origine ( j'en parle déja dans un autre post )
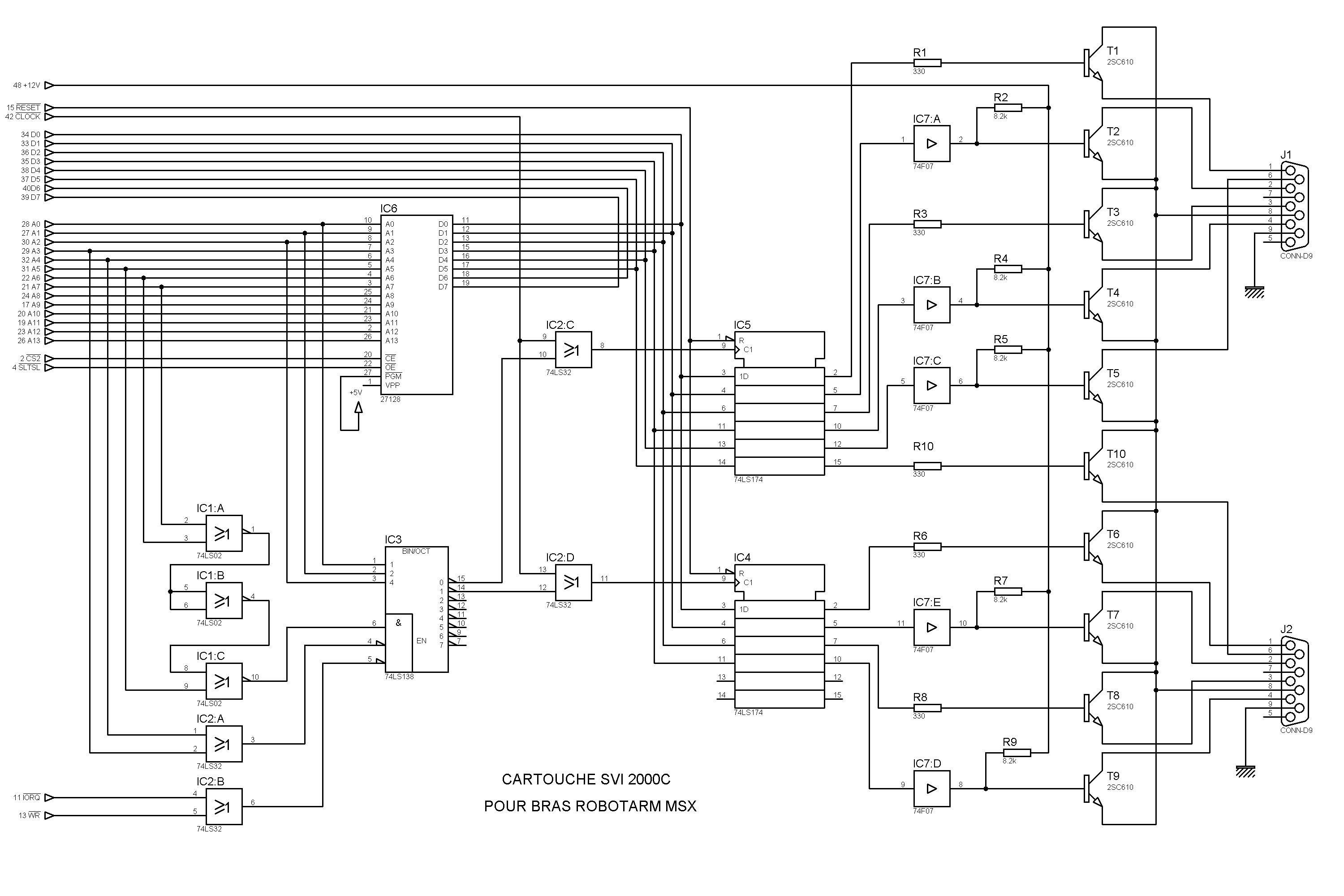
Magnifique, par contre attention c'est la version MSX1. Pour la version MSX2, il faut changer la rom, mettre un inter et une resistance 4,7k
Il est très facile ce schemas, je vais essayer de re-contacter mon correspondant pour des pcb "vierge" !!
Il est très facile ce schemas, je vais essayer de re-contacter mon correspondant pour des pcb "vierge" !!
Mon Github ->[/b] github.com/msxlegend
challenge 2013 -> neodream MSX 2013
Concepteur du -> KCX Bluetooth transmitter
Demo Terminator2 T2.zip
Salut.
Après pas mal d'heures de travail, voici une première ébauche bien avancée de l'implantation basée sur le schéma de Jipe
N'hésitez pas à me corriger si une erreur vous est visible!
Nb: Il manque l'implantation des Résistances et Transistors, Vcc et Gnd.
Obsolète!
@ Jipe: La Pin 27 de IC8 doit être reliée au Gnd? Edité par igal Le 31/10/2011 à 16h01
Après pas mal d'heures de travail, voici une première ébauche bien avancée de l'implantation basée sur le schéma de Jipe
N'hésitez pas à me corriger si une erreur vous est visible!
Nb: Il manque l'implantation des Résistances et Transistors, Vcc et Gnd.
Obsolète!
@ Jipe: La Pin 27 de IC8 doit être reliée au Gnd? Edité par igal Le 31/10/2011 à 16h01
perdu c'est relié au +5V
tu n'as pas le modéle un peu plus grand pour mes vieux yeux fatigués ?
si tu décales ic1 vers la gauche tu auras des traits droits dans ton bus d'adresses
la rom n'est pas indispensable si on veux juste piloter pas les out
sinon tu es bien parti
tu n'as pas le modéle un peu plus grand pour mes vieux yeux fatigués ?
si tu décales ic1 vers la gauche tu auras des traits droits dans ton bus d'adresses
la rom n'est pas indispensable si on veux juste piloter pas les out
sinon tu es bien parti
Répondre
Vous n'êtes pas autorisé à écrire dans cette catégorie