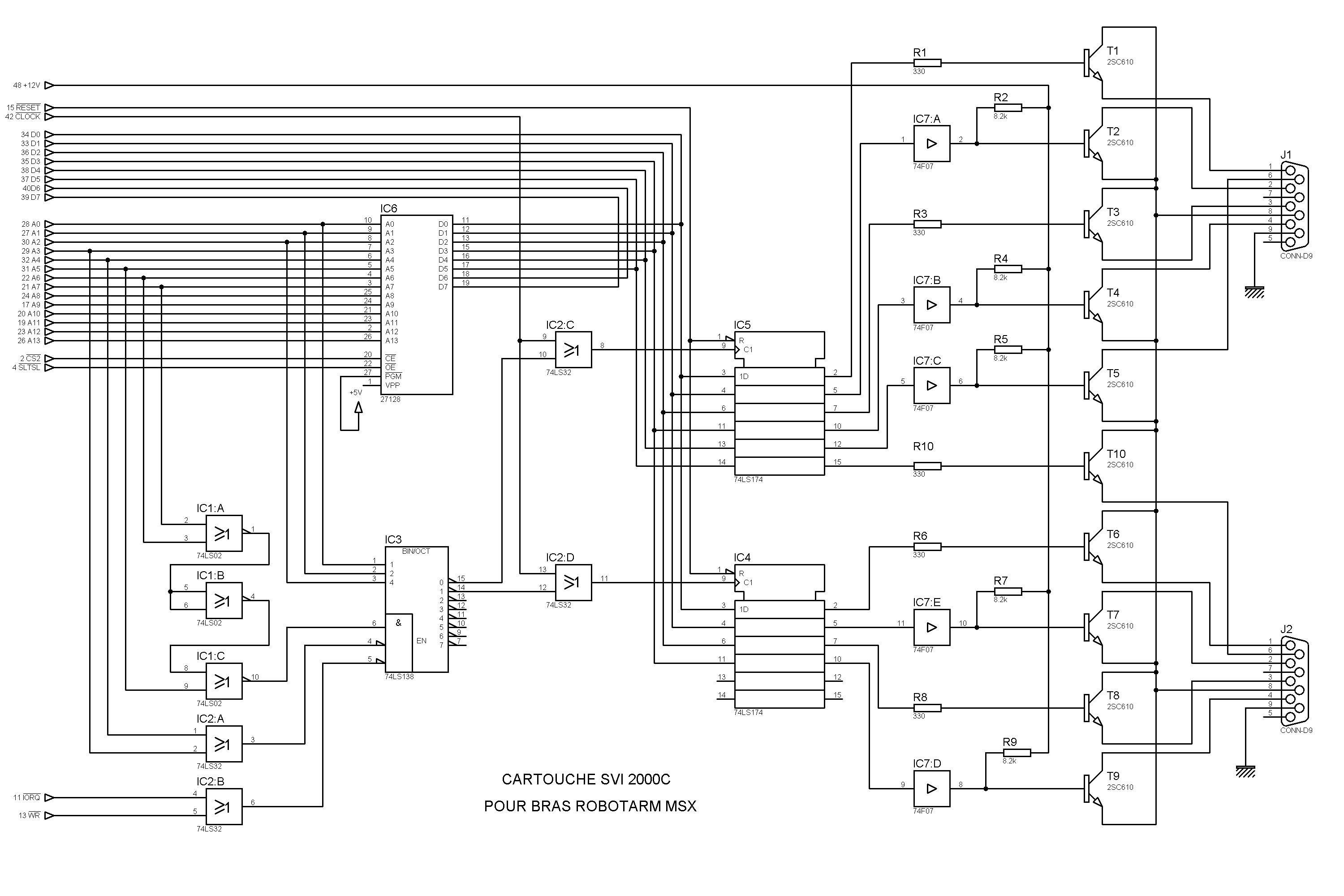
L'atelier Robotarm SVI le schéma

Reprise du message précédent
pour des bigs photos du PCB avec ses composants c'est icihttp://www.msx.org/forum/msx-talk/hardware/svi-robot-arm-alternative-way-interface


Merci 
A mon avis avec un routage bien nerveux ça rentre dans une cartouche normale.
Maintenant :
Qui serait intéressé ?
Qui vérifie le portage du schéma ?
Et surtout qui lance la prod ? Edité par Fabf Le 05/06/2014 à 18h01
A mon avis avec un routage bien nerveux ça rentre dans une cartouche normale.
Maintenant :
Qui serait intéressé ?
Qui vérifie le portage du schéma ?
Et surtout qui lance la prod ? Edité par Fabf Le 05/06/2014 à 18h01





Retrouvé et redimensionné:

Ça peut aider à avoir une vision même grossière du montage.
J'ai pas retrouvé ce dessin!
Si je le souviens bien, jipe avait evoque une fausse ressemblance dans le positionnement de certains transistors. Edité par igal Le 06/06/2014 à 10h23


attention aux transistors
Citation :
en fait sur le transistor il y a marqué 9014 puis dessous C610
j'ai donc fait une recherche avec 9014 et j'ai trouvé le S9014 qui correspond mieux au brochage E B C de la sérigraphie du circuit
j'ai donc fait une recherche avec 9014 et j'ai trouvé le S9014 qui correspond mieux au brochage E B C de la sérigraphie du circuit
J'avais fais cette implantation, cela peut te donner une idée un peu plus concrète du montage.
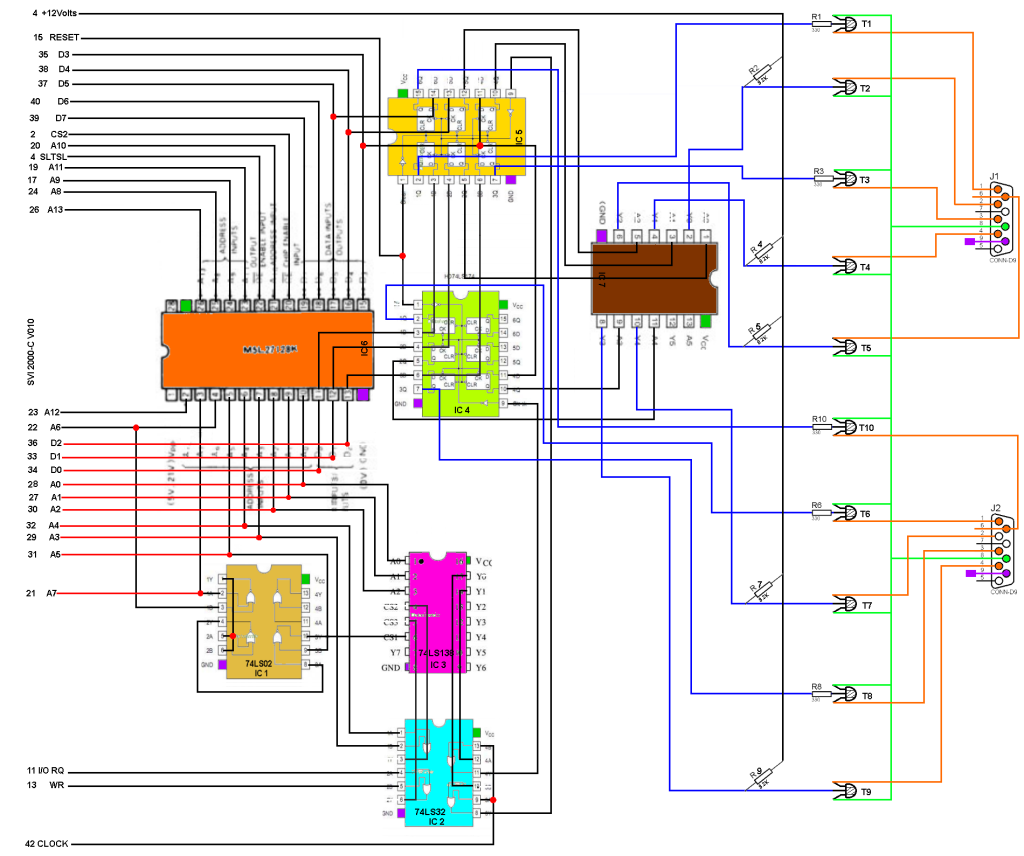
Pour le dessins en grande taille par ici => http://img254.imageshack.us/img254/1167/cartouchev010.png
Possible qu'une erreur se soit glissée dans le dessin. Dans tous les cas, j'ai jamais testé
Pour le dessins en grande taille par ici => http://img254.imageshack.us/img254/1167/cartouchev010.png
Possible qu'une erreur se soit glissée dans le dessin. Dans tous les cas, j'ai jamais testé

Je vais me lancer dans la réalisation d'un proto de cette interface.
Si je récapitule il faut :
- 2 x connecteurs DB9
-10 x Transistors S9014
-5 x resistances de 8,2K
- 5 x resistances de 330 ohms
- 2 x 74LS174
- 1 x 74LS138
- 1 x 74LS02
- 1 x 74LS32
- 1 x 74F07
- 1 x EPROM 27c128
- 7 x Condo 0,1uF
- 1 x condo eletrolytique 10Uf
c'est ça ?
Si je récapitule il faut :
- 2 x connecteurs DB9
-10 x Transistors S9014
-5 x resistances de 8,2K
- 5 x resistances de 330 ohms
- 2 x 74LS174
- 1 x 74LS138
- 1 x 74LS02
- 1 x 74LS32
- 1 x 74F07
- 1 x EPROM 27c128
- 7 x Condo 0,1uF
- 1 x condo eletrolytique 10Uf
c'est ça ?
Bonjour,
Je me suis intéressé au sujet car j'ai un Robotarm depuis peu sans interface.
J'ai repris le projet avec Kicad.
Les améliorations apportées à l'interface initiale sont :
Je vous invite à consulter le schéma et à le commenter.
En particulier, je me demande pourquoi la broche 9 des connecteurs DB9, reliée au +3V du robot est relié à la masse de la carte d'interface (à part une erreur d'interprétation du schéma initial) : le court-circuit me semble inévitable, non ?
De même, pour faire fonctionner le moteur dans un sens ou dans l'autre, on alimente le moteur en + ou - 3V. C'est effectivement réalisé en reliant la broche adéquate du connecteur à la masse, via un transistor. Le transistor ferme le circuit quand un courant est présent sur sa base. Jusqu'ici, tout va bien pour moi. Par contre, un électronicien pourrait-il m'expliquer pourquoi dans le cas du -3V, la base est activée directement via un transistor 330 Ω et dans le cas du +3V, la base est activée via un inverseur à collecteur ouvert, une résistance de 8,2 KΩ et le +12V. J'avoue que là, une explication serait la bienvenue.
Voici un aperçu 3D de la carte nommée SVI-2017 :

Merci de votre aide. Je précise que je ne suis pas électronicien, mais informaticien.
Pour les personnes intéressées, j'ai ouvert un sujet sur ce projet sur le forum du site system-cfg.com.
Je me suis intéressé au sujet car j'ai un Robotarm depuis peu sans interface.
J'ai repris le projet avec Kicad.
Les améliorations apportées à l'interface initiale sont :
- sélection de la version de la ROM : MSX ou MSX 2,
- inhibition de la ROM pour programmation directe en PIO.
Je vous invite à consulter le schéma et à le commenter.
En particulier, je me demande pourquoi la broche 9 des connecteurs DB9, reliée au +3V du robot est relié à la masse de la carte d'interface (à part une erreur d'interprétation du schéma initial) : le court-circuit me semble inévitable, non ?
De même, pour faire fonctionner le moteur dans un sens ou dans l'autre, on alimente le moteur en + ou - 3V. C'est effectivement réalisé en reliant la broche adéquate du connecteur à la masse, via un transistor. Le transistor ferme le circuit quand un courant est présent sur sa base. Jusqu'ici, tout va bien pour moi. Par contre, un électronicien pourrait-il m'expliquer pourquoi dans le cas du -3V, la base est activée directement via un transistor 330 Ω et dans le cas du +3V, la base est activée via un inverseur à collecteur ouvert, une résistance de 8,2 KΩ et le +12V. J'avoue que là, une explication serait la bienvenue.
Voici un aperçu 3D de la carte nommée SVI-2017 :
Merci de votre aide. Je précise que je ne suis pas électronicien, mais informaticien.
Pour les personnes intéressées, j'ai ouvert un sujet sur ce projet sur le forum du site system-cfg.com.

{kind=link}
Répondre
Vous n'êtes pas autorisé à écrire dans cette catégorie